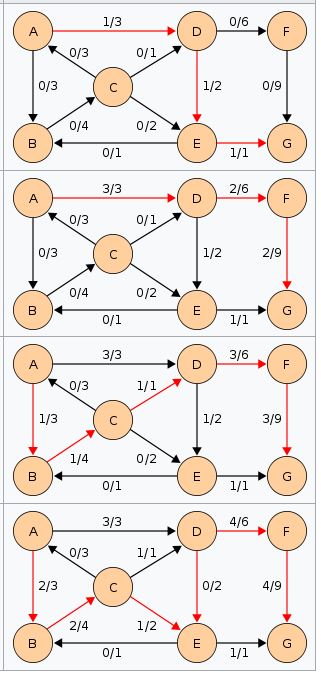
Kruskal’s algorithm to find the minimum cost spanning tree uses the greedy approach. This algorithm treats the graph as a forest and every node it has as an individual tree. A tree connects to another only and only if, it has the least cost among all available options and does not violate MST(Minimum spanning tree) properties.
Kruskal’s algorithm
- create a forest F (a set of trees), where each vertex in the graph is a separate tree
- create a set S containing all the edges in the graph
- while S is nonempty and F is not yet spanning
- remove an edge with minimum weight from S
- if the removed edge connects two different trees then add it to the forest F, combining two trees into a single tree
At the termination of the algorithm, the forest forms a minimum spanning forest of the graph. If the graph is connected, the forest has a single component and forms a minimum spanning tree Kruskal’s algorithm can be shown to run in O(E log E) time, or equivalently, O(E log V) time, where E is the number of edges in the graph and V is the number of vertices.
Program in C :
#include<stdlib.h>
#include<stdio.h>
#define NIL -1
#define MAX 100
struct edge
{
int x;
int y;
int weight;
struct edge *link;
}*front = NULL;
void create_tree(struct edge tree[]);
void insert_queue(int i, int j, int wt);
struct edge *delete_queue();
int isEmpty();
void make_a_graph();
int vertices;
int main()
{
int count;
struct edge tree[MAX];
int tree_weight = 0;
make_a_graph();
create_tree(tree);
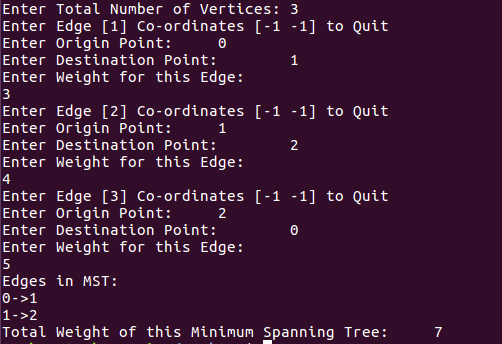
printf("Edges in MST:\n");
for(count = 1; count <= vertices - 1; count++)
{
printf("%d->", tree[count].x);
printf("%d\n", tree[count].y);
tree_weight = tree_weight + tree[count].weight;
}
printf("Total Weight of this Minimum Spanning Tree:\t%d\n", tree_weight);
return 0;
}
void create_tree(struct edge tree[])
{
struct edge *tmp;
int y1, y2, root_y1, root_y2;
int parent[MAX];
int i, count = 0;
for(i = 0; i < vertices; i++)
{
parent[i] = NIL;
}
while(!isEmpty( ) && count < vertices - 1)
{
tmp = delete_queue();
y1 = tmp->x;
y2 = tmp->y;
while(y1 != NIL)
{
root_y1 = y1;
y1 = parent[y1];
}
while(y2 != NIL)
{
root_y2 = y2;
y2 = parent[y2];
}
if(root_y1 != root_y2)
{
count++;
tree[count].x = tmp->x;
tree[count].y = tmp->y;
tree[count].weight = tmp->weight;
parent[root_y2] = root_y1;
}
}
if(count < vertices - 1)
{
printf("Graph is Disconnected. Therefore, Spanning Tree is not possible\n");
exit(1);
}
}
void insert_queue(int i, int j, int wt)
{
struct edge *tmp, *q;
tmp = (struct edge *)malloc(sizeof(struct edge));
tmp->x = i;
tmp->y = j;
tmp->weight = wt;
if(front == NULL || tmp->weight < front->weight)
{
tmp->link = front;
front = tmp;
}
else
{
q = front;
while(q->link != NULL && q->link->weight <= tmp->weight)
{
q = q->link;
}
tmp->link = q->link;
q->link = tmp;
if(q->link == NULL)
{
tmp->link = NULL;
}
}
}
struct edge *delete_queue()
{
struct edge *tmp;
tmp = front;
front = front->link;
return tmp;
}
int isEmpty()
{
if(front == NULL)
{
return 1;
}
else
{
return 0;
}
}
void make_a_graph()
{
int count, weight, maximum_edges, origin_vertex, destination_vertex;
printf("Enter Total Number of Vertices:\t");
scanf("%d", &vertices);
maximum_edges = vertices * (vertices - 1)/2;
for(count = 0; count < maximum_edges; count++)
{
printf("Enter Edge [%d] Co-ordinates [-1 -1] to Quit\n", count + 1);
printf("Enter Origin Point:\t");
scanf("%d", &origin_vertex);
printf("Enter Destination Point:\t");
scanf("%d", &destination_vertex);
if((origin_vertex == -1) && (destination_vertex == -1))
{
break;
}
printf("Enter Weight for this Edge:\n");
scanf("%d", &weight);
if(origin_vertex >= vertices || destination_vertex >= vertices || origin_vertex < 0 || destination_vertex < 0)
{
printf("Entered Edge Co - ordinates is Invalid\n");
count--;
}
else
{
insert_queue(origin_vertex, destination_vertex, weight);
}
}
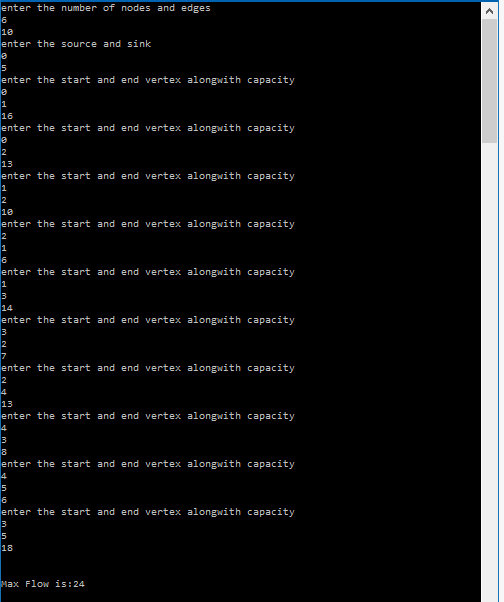
}Output:
Please comment below in case of any problem found during running the code or any other doubts.